-
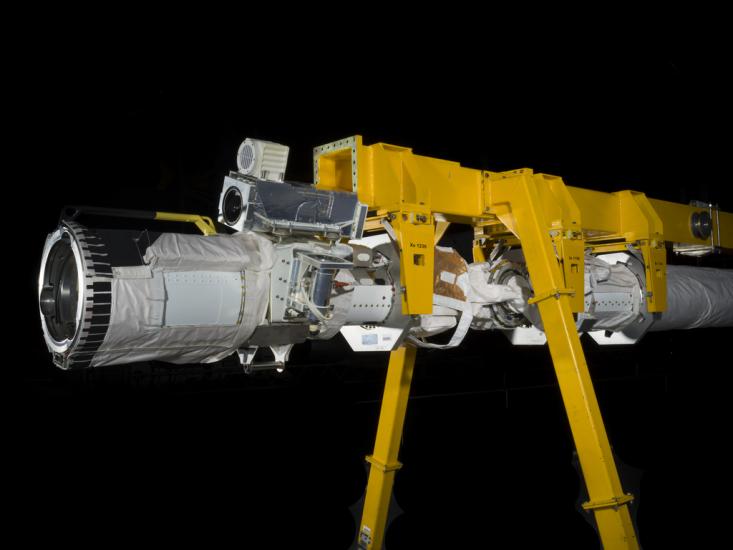
This jointed robotic arm, known as the Canadarm or Remote Manipuplator System arm was used to move payloads and position astronauts working outside the Space Shuttle or International Space Station. Attached to the payload bay sill of the shuttle orbiter and remotely operated by an astronaut at a control station inside the spacecraft, the arm has shoulder, elbow, and wrist joints plus an end effector that serves as a grappling hand.