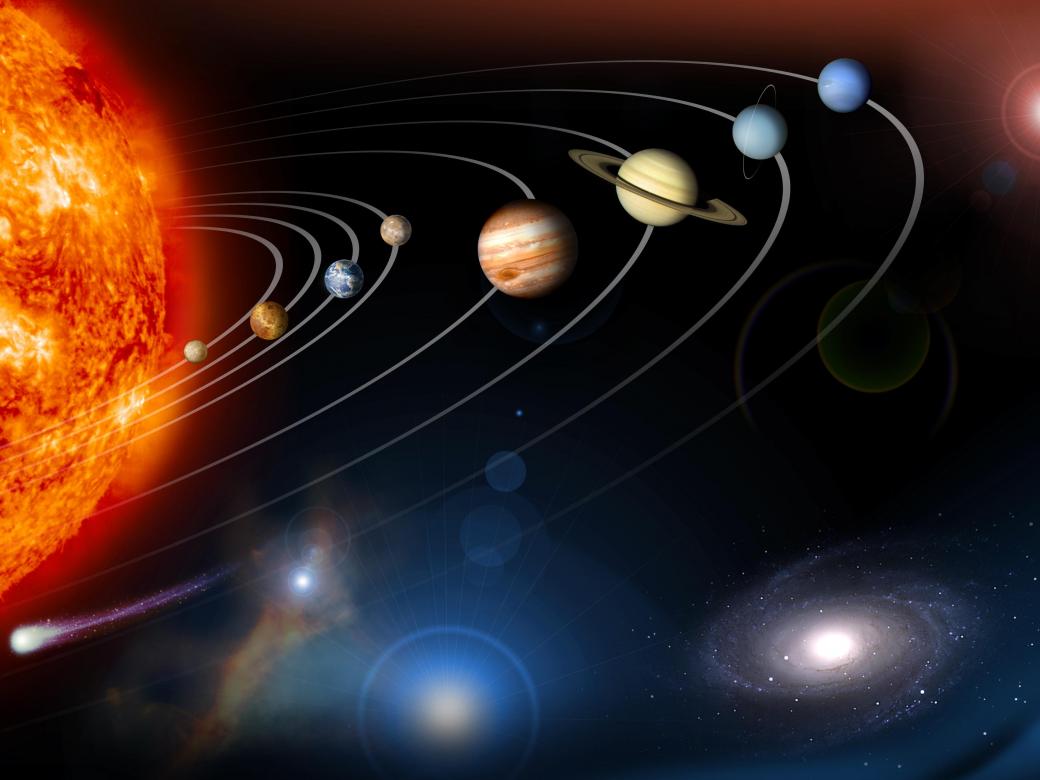
The Solar System, located in the Milky Way Galaxy, is our celestial neighborhood. Our Solar System consists of 8 planets, several dwarf planets, dozens of moons, and millions of asteroids, comets, and meteoroids. They are all bound by gravity to the Sun, which is the star at the center of the Solar System.
Jump to content:
The Solar System, located in the Milky Way Galaxy, is our celestial neighborhood. Our Solar System consists of 8 planets, several dwarf planets, dozens of moons, and millions of asteroids, comets, and meteoroids. They are all bound by gravity to the Sun, which is the star at the center of the Solar System.
Jump to content:
Teacher
cc-by-nc
Teacher
cc-by-nc
Student
cc-by-nc
Student
cc-by-nc
Teacher
cc-by-nc
Student
cc-by-nc